Navigation in Liver Surgery
Project Description
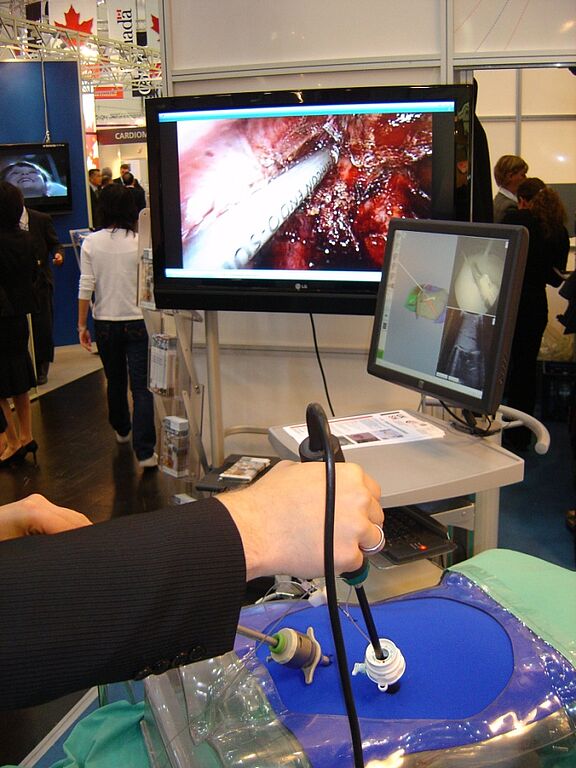
Laparoscopic surgery presents a minimally invasive alternative for liver surgery and has a number of clinical advantages. However, it is complicated by reduced depth perception and the loss of tactile feedback, which can be compensated with a navigation system.
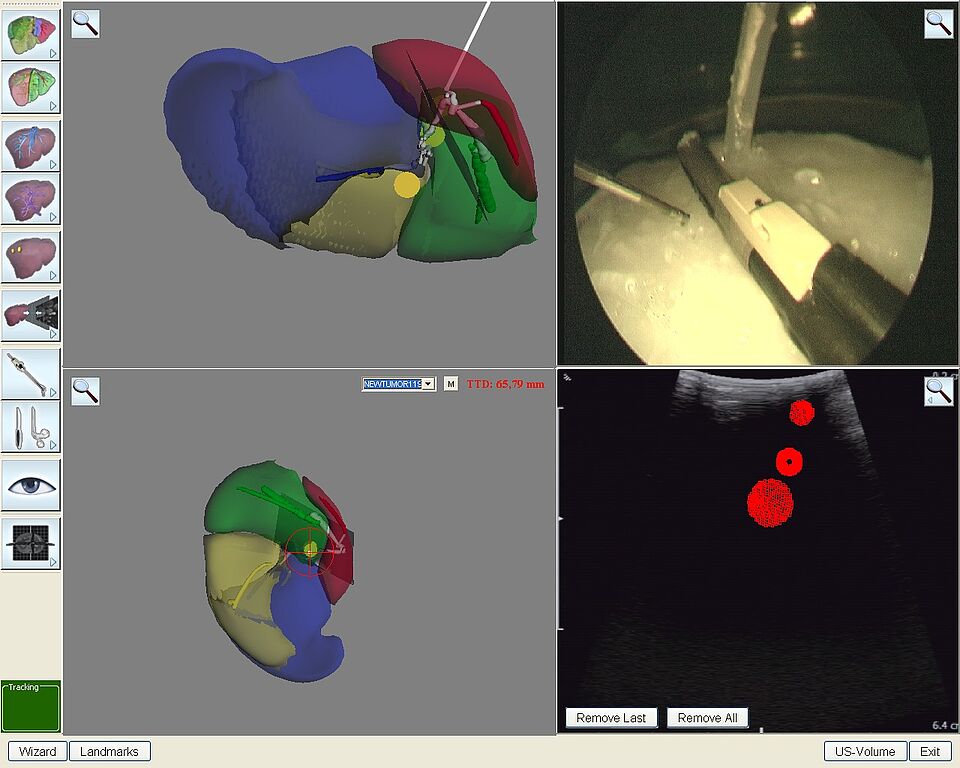
In sub - project PNT–4 (Laparoscopy-Assistant), an assistance system for navigated laparoscopic liver surgery has been developed. By integrating ultrasound, laparoscopic images and instruments the system compensates for the loss of tactile feedback and reduced depth perception.
Moreover, it helps the surgeon to fuse the preoperative planning data with intra-operative ultrasound and video images and to navigate the surgical instruments and laparoscopic ultrasound probe using an electromagnetic tracking system. The system fulfills all requirements presented at the beginning or during the project and was validated with respect to quality and risk aspects. It was approved for a clinical investigation according to annex VIII of the Medical Devices Act.
Publications
2010
LapAssistent -- computer assisted laparoscopic liver surgery, Rostock , 2010.
2008
Ein Client-Server Framework für Trackingsysteme in medizinischen Assistenzsystemen, Bartz, Dirk and Bohn, S. and Hoffmann, J., Eds. Leipzig, Germany , 2008. pp. 7-10.
LapAssistent - a laparoscopic liver surgery assistence system, Magjarevic, Ratko and Sloten, Jos and Verdonck, Pascal and Nyssen, Marc and Haueisen, Jens, Eds. Antwerpen, Belgium: Springer, 2008. pp. 121-125.
| DOI: | 10.1007/978-3-540-89208-3_31 |
| File: | 978-3-540-89208-3_31 |
2007
Design and development of adapters for electromagnetic trackers to perform navigated laparoscopic radiofrequency ablation, Annals of Surgical Innovation and Research , vol. 1, no. 7, 2007.
| DOI: | 10.1186/1750-1164-1-7 |
| File: | 1750-1164-1-7 |
Evaluation of an online navigation system for laparoscopic interventions in a perfused ex vivo artificial tumor model of the liver, The Official Journal of the International Hepato Pancreato Biliary Association , vol. 9, no. 3, pp. 190-194, 2007.
| DOI: | 10.1080/13651820601089077 |
| File: | 13651820601089077 |
Videooptische 3D-Lagebestimmung zylinderförmiger Instrumente für die Laparoskopie, Karlsruhe , 2007.
Prototype of an intraoperative navigation and documentation system for laparoscopic radiofrequency ablation: First experiences, European Journal of Surgical Oncology , vol. 34, no. 4, pp. 418-421, 2007.
Navigationsunterstützte Leberchirurgie: Stand der klinischen und experimentellen Forschung, Schleswig-Holsteinisches Ärzteblatt , vol. 10, pp. 51-56, 2007.
Evaluation und relative Positionskorrektur eines magnetischen Trackingsystems für die minimal-invasive Chirurgie, Karlsruhe , 2007. pp. 271-274.
Ein magnetisches Navigationssystem für die minimal-invasive Leberchirurgie, Aachen 2007 , 2007.
Design und Entwicklung von sterilisierbaren Adaptern für navigierte viszerale (Leber) Chirurgie und erste praktische Erfahrungen, Berlin , 2007.
Der LapAssistent - Ein System zur Navigation bei laparoskopischen Leberoperationen, Berlin , 2007.
Design and Development of sterilisable adapters for navigated visceral (liver) surgery and first practical experiences, Berlin , 2007.
Intraoperative documentation of laparoscopic radiofrequency ablation of liver tumors -- First Experiences, Berlin, Germany , 2007.
| File: |
2006
Entwicklung eines sonografischen Navigationssystems für die Laparoskopie, 2006.
Evaluation of EM tracking systems for laparoscopic liver surgery, Osaka, Japan , 2006.
"Navigationsunterstützte Leberchirurgie: Stand der klinische und experimentellen Forschung" 2006.
"Die Erfassung des Raumes - Grundlagen der Trackingtechnologie" 2006.
"Entwicklung einer Navigationsumgebung (LapAssistent) für die ultraschallnavigierte laparoskopische Leberchirurgie" 2006.
First results of accuracy of virtual liver cut classification for automatic landmark extraction, 2006.
2005
Navigation in der Viszeralchirurgie, Berlin , 2005.

- Research
- SonoBox: A Robotic Ultrasound System for Pediatric Forearm Fracture Diagnosis
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultrasound Guided Radiation Therapy
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Finished Projects -
- High-Accuracy Head Tracking
- Neurological Modelling
- Modelling of Cardiac Motion
- Motion Compensation in Radiotherapy
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Goal-based Open ended Autonomous Learning
- Transcranial Electrical Stimulation
- Treatment Planning
- Transcranial Magnetic Stimulation
- Navigation in Liver Surgery
- Stereotactic Micronavigation
- Surgical Microscope
- Interactive C-Arm
- OCT-based Neuro-Imaging
Achim Schweikard

Gebäude 64
,
Raum 94
achim.schweikard(at)uni-luebeck.de
+49 451 31015232
Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ehemalige Projektmitarbeiter
- Dr.-Ing. Volker Martens
- Dr.-Ing. Osama Shahin
- Armin Besirevic