Interaktiver C-Arm
Projektbeschreibung

Das Ziel dieses Projektes besteht in der Erforschung und Erprobung neuer Ansätze für ein roboterisiertes C-Bogen System. Insbesondere die Gewinnung räumlicher Information (3D-Rekonstruktion) und die intelligente Positionierung des Systems stehen dabei im Vordergrund.
In diesem Projekt wurde ein herkömmlicher C-Bogen mit Positionsencodern und Motoren ausgestattet. Dadurch eröffnen sich eine Reihe neuer Applikationen und Möglichkeiten. Zahlreiche ergonomische Verbesserungen wie beispielsweise das Verfahren des Systems in einer definierten Ebene oder die einfache Neuzentrierung des Sichtfeldes sind dabei im Gegensatz zu herkömmlichen Geräten leicht zu bewerkstelligen.
Durch die Kenntnis der Projektionsgeometrie aus den ermittelten Encoderwerten und der Vorwärtskinematik ist es auch möglich, 3D Informationen aus den Projektionsdaten (mind. 2 unterschiedliche Projektionsrichtungen sind erforderlich) zu gewinnen. Bei der Aufnahme von Projektionsdaten über einen kompletten Orbit eines Objektes lassen sich auch 3D-Rekonstruktionen (Computer Tomographie) errechnen. Darüberhinaus kann der C-Bogen mittels der inversen kinematischen Lösung auch exakt im Raum positioniert werden, was eine intelligente Positionierung ermöglicht.
Weitere Forschungsschwerpunkte
Nachdem die Grundlagen der Motorisierung und Ansteuerung abgeschlossen sind, ergeben sich neue grundlegende Fragestellungen. Um beispielsweise eine (semi)automatische Positionierung zu ermöglichen, müssen aus den zweidimensionalen Daten 3D Informationen gewonnen werden. Auch inwieweit Modellwissen (z.B. Atlanten) und andere Constraints dabei helfen können die Anzahl der nötigen Projektionen und damit die Strahlenbelastung zu reduzieren ist von großem Interesse.
Daneben muss auch auf Probleme wie die Kompensation von Positionier- und Bewegungsartefakten näher eingegangen werden.
Folgende Gebiete werden dabei im Kontext des mobilen C-Bogens untersucht:
- 2D/3D Registrierung
- 3D/4D Rekonstruktion
- Kompensation von Verzerrungs- und Positionierungsartefakten
2D/3D Registrierung
Um präoperative oder generische Daten mit aufgenommenen Daten in Beziehung setzen zu können, müssen die jeweiligen Koordinatensysteme der beteiligten Datensätze aufeinander abgebildet werden. Das Finden dieser Abbildung oder Transformation bezeichnet man dabei gemeinhin als Registrierung. Bei der 2D/3D-Registrierung werden hierbei die aufgenommenen zweidimensionalen Projektionen mit dreidimensionalen Daten in Beziehung gesetzt. Das Problem der unterschiedlichen Dimensionen wird dabei durch ein geeignetes Abstandsmaß angegangen. Hierbei werden meist aus den dreidimensionalen Daten zweidimensionale Daten erzeugt (simulierte Projektionen - DRRs) oder auch neuerdings dreidimensionale Informationen aus den 2D-Projektionen errechnet und ein 3D-3D Abstandsmaß herangezogen.
- Rigide 2D/3D-Registrierung
Die rigide 2D/3D-Registrierung wird meist dazu verwendet um präoperative CT oder MR-Daten auf den jeweiligen Situs zu übertragen. Dadurch steht nach 2-3 Flouroskopieaufnahmen der CT-Datensatz als Navigationsgrundlage in der OP zur Verfügung.
Beispiel für eine intensitätbasierte rigide 2D/3D-Registrierung mittels des roboterisierten C-Bogen Systems.
- Nicht Rigide 2D/3D-Registrierung
Eine anatomisch korrekte 3D-Rekonstruktion aus wenigen Röntgenaufnahmen ist in der Regel nur unter expliziter Verwendung von a-priori-Wissen möglich. Eine Möglichkeit besteht nun in der Verwendung von generischen Modelldaten als Vorwissen. Durch eine nicht rigide Registrierung der generischen Daten auf die aufgenommen Patientendaten kann somit eine approximative Rekonstruktion erreicht werden. Generell existieren hier 2 Ansätze die sich durch die zu optimierende Distanzfunktion und der benutzten Information unterscheiden:
- Konturbasierte nicht rigide 2D/3D-Registrierung
Hier werden die Abstände der Konturgeneratoren (Kanten des Modells, welche einen Beitrag zur Kontur leisten) des A-Priori Modells (statistisches Oberflächenmodell) im Bezug zu den segmentierten Konturen der 2D-Projektionen minimiert.
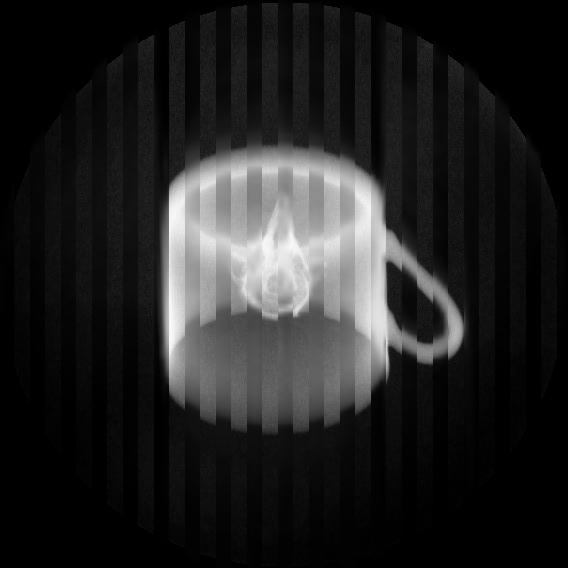
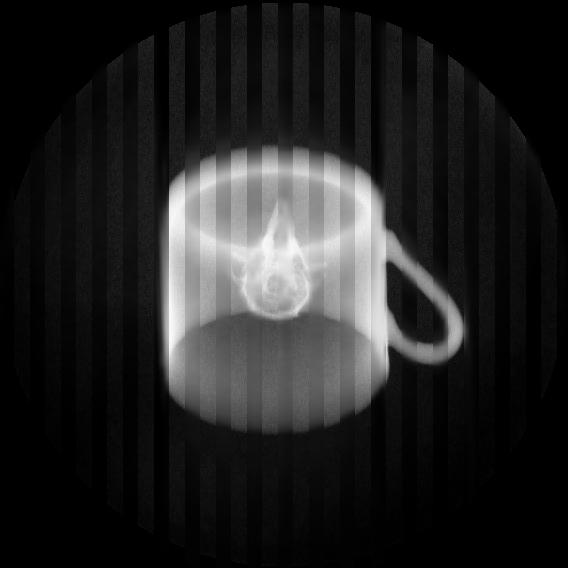
- Intensitätsbasierte nicht rigide 2D/3D-Registrierung
Hier werden die Intensitätsinformationen der Flouroskopieaufnahmen in den Registrierungsprozess mit einbezogen. Das A-Priori Modell besteht nun aus einem statistischen Volumenmodell der entsprechenden Zielregion:
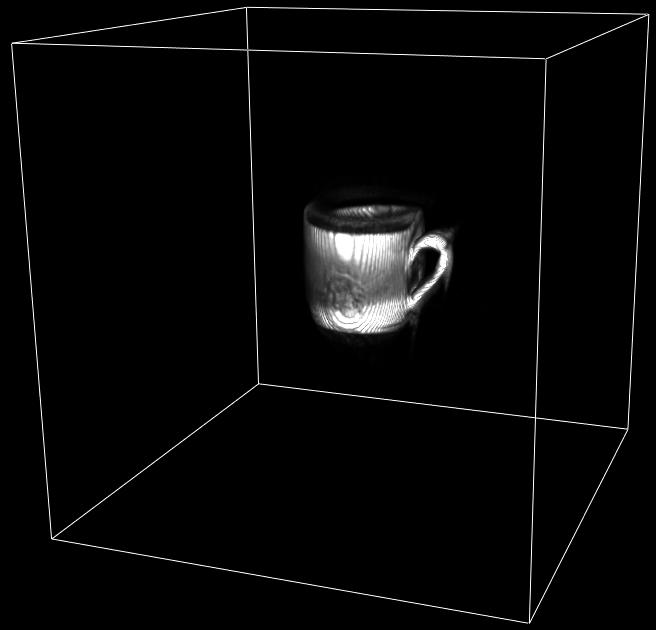
3D/4D Rekonstruktion
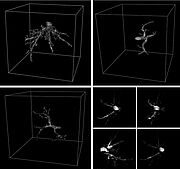
Um eine 3D-Rekonstruktion (CT) aus den aufgenommenen 2D-Daten (Röntgenbilder) errechnen zu können, müssen über einen kompletten Orbit um das Objekt herum Projektionen aufgenommen werden.
Für die Bestrahlungsplanung (siehe Cyberknife Bestrahlungssystem) kann es notwendig sein CT-Rekonstruktionen über die Zeit (4.Dimension) hinweg aufzunehmen. Dadurch wird es beispielsweise in der Radiochirurgie möglich, Atembewegungen auszugleichen und dadurch gesundes Gewebe zu schonen. Die Aufnahme und Rekonstruktion solcher Daten stellt dabei eine große Herausforderung dar, insbesondere für mobile Aufnahmegeräte. Neben kurzen Aufnahmezeiten der einzelnen Projektionen (um Bewegungsartefakte innerhalb der Aufnahmen zu vermeiden) müssen die Projektionsdaten zeitlich korrekt innerhalb des jeweiligen Bewegungszyklus aufgenommen werden. Hierbei kommt es unvermeidlich zu Inkonsistenzen in den Daten, die dementsprechend behandelt werden müssen.
Kompensation von Verzerrungs- und Positionierungsartefakten
Das Ziel dieses Projektes besteht in der bestmöglichen (softwareseitigen) Elimination von Verzerrungs-, Bewegungs- und Positionierungsartefakten. Diese Artefakte entstehen durch Inkonsistenzen in den Projektionsdaten aufgrund von Meßfehlern verschiedenster Art.
- Bewegungs- und Positionierungsartefakte
Die errechnete Projektionsgeometrie aus den Positionsencodernwerten weicht in der Praxis leicht von der realen Geometrie ab. Neben einem unvermeidlichen Gelenkspiel und inhärenten Meßfehlern führen auch die hohen Massen des Bildverstärkers und der Röntgenquelle zu eine Verwindung des gesamten Systems. Bei der Verwendung von Standard-Orbits kann dieses Problem meist leicht durch Look-Up Tables gelöst werden. In Falle einer freien Positionierung und der Verwendung von frei definierbaren Orbits kommt es jedoch zu größeren Fehlern, die sich als Artefakte in den 3D-Rekonstruktionen bemerkbar machen.
Durch iterative Verfahren kann ein Anteil dieser Positionsartefakte aus den Daten herausgerechnet und kompensiert werden. Hierbei wird meist das inkonsistente Rekonstruktionsproblem durch eine Optimierung der Rekonstruktionsgleichungen mit einer gleichzeitigen Modellierung der stattgefundenden Bewegung ersetzt. Desweiteren existieren auch Verfahren aus der SPECT-Tomographie die erfolgreich auf die CT-Rekonstruktion übertragen werden können. Problematisch bei diesen Ansätzen ist jedoch die hohe Berechnungskomplexität der Kompensationsalgorithmen.
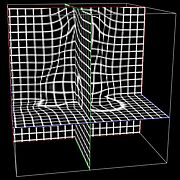
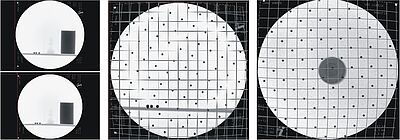
- Verzeichnungsartefakte
Die durch einen Bildverstärker erzeugten Projektionen sind in der Regel nichtlinear verzerrt. Die Verzeichnung ist dabei in der Bildmitte am geringsten und nimmt zum Randbereich hin zu. In der Elektronenoptik des Bildverstärkers werden die frei werdenden Elektronen auf dem Weg zur Kamera durch externe Magnetfelder (z.B. dem Erdmagnetfeld) abgelenkt. Dies führt zu einer charakteristischen S-förmigen Verzeichnung der Projektionsdaten. Zur Korrektur werden hierbei Kalibrationskörper in den Strahlengang eingebracht und die Deformation an bekannten Stützstellen bestimmt. Anschließend erfolgt eine Interpolation der Deformation um ein kontinuierliches Deformationsfeld zu erhalten.
Durch die Verwendung von Flatpanel-Detektoren werden Korrekturen dieser Art überflüssig, da mit dieser Technologie keine Verzeichnungsartefakte mehr auftreten.
Veröffentlichungen
2009
Achieving super-resolution X-ray imaging with mobile C-arm devices, International Journal of Medical Robotics and Computer Assisted Surgery , vol. 5, no. 3, pp. 243-256, 2009.
| DOI: | 10.1002/rcs.255 |
| Datei: | rcs.255 |
Vascular Tree Reconstruction with Discrete Tomography - Intensity Based Camera Correction for 3D-Reconstruction, International Journal of Computer Assisted Radiology and Surgery , vol. 4, no. 2, pp. 189-202, 2009.
| DOI: | 10.1007/s11548-009-0283-4 |
| Datei: | s11548-009-0283-4 |
Super-Resolution für mobile C-Bogen-Systeme, Heidelberg: Springer-Verlag, 2009.
A Fast Intensity Based Non-rigid 2D-3D-Registration Using Statistical Regularization with Application in Radiosurgery, San Jose , 2009.
Röntgenbasierte Bildgebung mittels eines roboterisierten C-Bogen-Systems, Ratzeburger Allee 160, 2009.
| Datei: | 34 |
2008
Vascular Tree Reconstruction with Discrete Tomography - Parallel 3D-reconstruction Algorithms for Inconsistent Projection Data based on Linear Optimization, 2008.
2007
Closed-form inverse kinematic solution for fluoroscopic C-arms, Advanced Robotics , vol. 21, no. 8, pp. 869-886, 2007.
| DOI: | 10.1163/156855307780851957 |
| Datei: | 156855307780851957 |
Motion and Positional Error Correction for Cone Beam 3D-Reconstruction with Mobile C-Arms, Brisbane, Australia , 2007.
Approximative Rekonstruktion von Knochenoberflächen mittels elastischer 2D-3D Registrierung eines generischen Modells mit Flouroskopieaufnahmen, Karlsruhe , 2007.
3D-Rekonstruktion aus DSA-Projektionsdaten mittels diskreter Tomographie - Ein Kombinationsansatz mit einem iterativen Rekonstruktionsverfahren, Munich, Germany , 2007.
Realisierung eines robotischen Röntgen-C-Bogens. Technische Umsetzung und Applikationen, 2007.
2006
Mobile Robots: towards new applications, Lazinica, Aleksandar, Eds. Germany,Austria: Pro Literatur Verlag, 2006, pp. 403-418.
| DOI: | 10.5772/4701 |
| ISBN: | 3-86611-198-3 |
| Datei: | 4701 |
Image Guided Positioning For an Interactive C-arm Fluoroscope, Osaka, Japan , 2006.
Vascular tree reconstruction with discrete tomography - a practical approach, Hannover , 2006.
2005
A Robotic C-arm Fluoroscope, International Journal of Medical Robotics and Computer Assisted Surgery , vol. 1, no. 3, pp. 108-116, 2005.
| DOI: | 10.1002/rcs.34 |
| Datei: | rcs.34 |
2004
Röntgen-C-Bogen Simulator, 2004.
| Datei: | www.medicstream.de |
The Inverse Kinematics of Fluoroscopic C-Arms, München , 2004. pp. 1-5.

- Forschung
- SonoBox: Ein Roboter-Ultraschallsystem zur Diagnose von Unterarmfrakturen bei Kindern
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultraschallgeführte Strahlenchirurgie
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Abgeschlossene Projekte -
- Hochpräzise Bewegungsverfolgung am Kopf in der Strahlentherapie
- Neurologische Modellierungen
- Modellierung von Herzbewegungen
- Bewegungskompensation in der Strahlentherapie
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Ziel-basierendes lebenslanges autonomes Lernen
- Transkranielle Elektrostimulation
- Bestrahlungsplanung
- Transkranielle Magnetstimulation
- Navigation in der Leberchirurgie
- Stereotaktische Mikronavigation
- OP - Mikroskop
- Interaktiver C-Arm
- OCT-basierte Neurobildgebung
Achim Schweikard

Gebäude 64
,
Raum 94
achim.schweikard(at)uni-luebeck.de
+49 451 31015232
Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ehemalige Projektmitarbeiter
- Dr.-Ing. Christoph Bodensteiner
- Dr.-Ing. Norbert Binder