Robotics Laboratory (RobLab)
Projektbeschreibung
Roboter haben sich in den Jahrzehnten als treue Gehilfen etabliert. Unter hohen Lasten, schwierigen und gefährlichen Bedingungen können sie schnell und mit sehr hoher Genauigkeit Arbeiten verrichten, wo Menschen an ihre Grenzen stoßen. So komplettieren sie den Menschen beispielsweise bei Fräsarbeiten, die höchste Präzision fordern, bei Schweiß- und Montagearbeiten in der Automobilindustrie oder auch in Gießereien. Dabei sind die Robotersysteme speziell an ihre Aufgabe angepasst und ihre Bewegungsmuster starr vorgegeben. Auf den vorprogrammierten Bahnen bewegen sich die Roboter mit oftmals sehr hohen Geschwindigkeiten und entwickeln dabei enorme Kräfte, die vor allem für den Menschen zur Gefahr werden. Daher sind die Arbeitsumgebungen der Robotersysteme strikt von denen der menschlichen Mitarbeiter abgegrenzt. Dies fordert hohen Platzbedarf, ist kostenintensiv und macht eine dynamische Mensch-Maschine-Interaktion unmöglich.
Doch zunehmend finden Robotersysteme ihren Einzug in medizinische Bereiche, wie beispielsweise OPs oder in strahlentherapeutische Systeme. Außerdem steigt die Nachfrage nach eben diesen dynamischen Arbeitsweisen im industriellen Umfeld. Der Mensch-Roboter-Kontakt (MRK) wird dadurch immer präsenter und erfordert sowohl neue Sicherheitsanforderungen als auch neue Bahnplanungskonzepte und teilweise grundlegend neue Robotersysteme. Neuere Systeme besitzen zum Beispiel bereits integrierte Sensoren, welche den Kontakt mit Gegenständen oder auch Menschen wahrnehmen und darauf entsprechend reagieren können. So existieren bereits seit Neuestem Roboter, welche nach ISO genormte Sicherheitsstandards für den genannten MRK einhalten.
Die Arbeitsgruppe RobLab befasst sich im Allgemeinen mit der Entwicklung von Methoden und Softwarewerkzeugen für die Planung, Modellierung, Entwicklung, Steuerung, Analyse und Simulation neuartiger Robotersysteme. Dazu entwickeln wir eine Software speziell für Gelenkarmroboter.
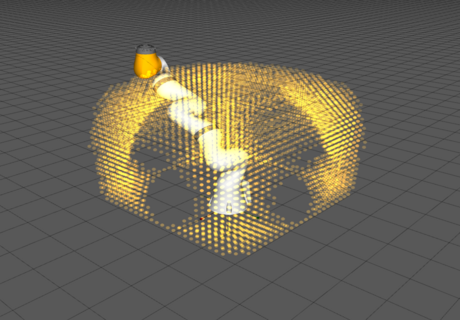
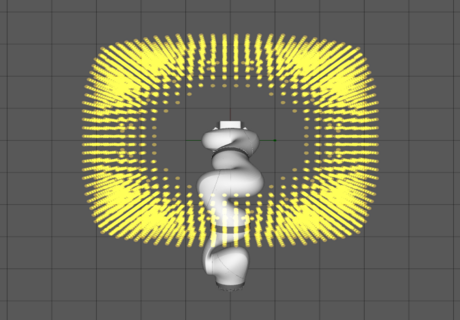
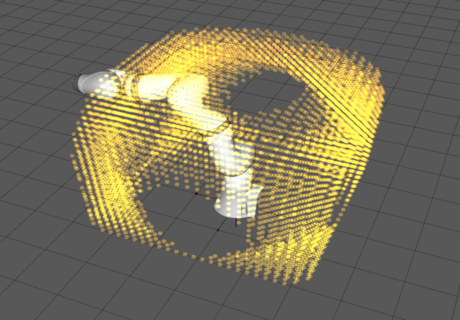
Dynamische Arbeitsraumanalyse für verschiedene Robotergeometrien
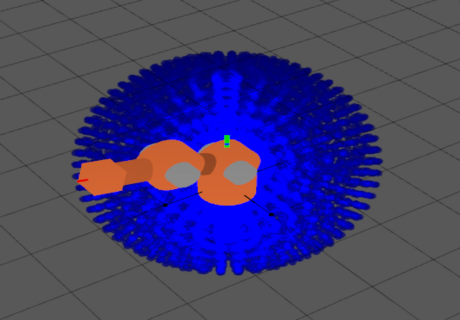
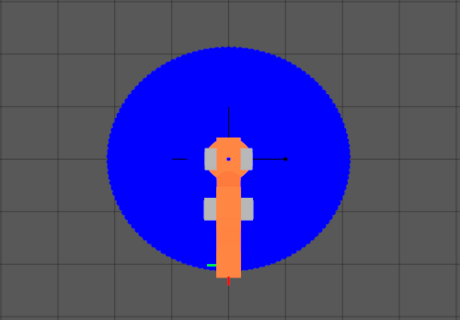
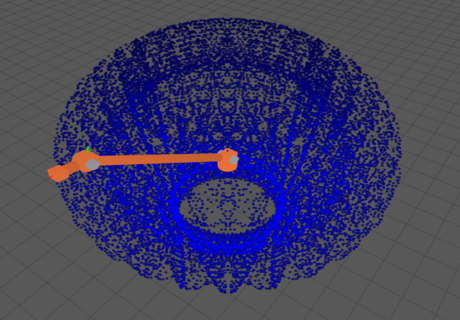
Der Fokus der Software liegt in der professionellen Konstruktion, Entwicklung und Simulation existierender sowie experimenteller Robotersysteme. Integriert werden unter anderem Methoden zur Analyse der verschiedenen Kinematiken hinsichtlich der Dexterität (Bewegungsmöglichkeiten), des Arbeits- und Konfigurationsraumes. Allerdings resultiert die Manipulation von Konstruktionsparametern häufig in einer starken Veränderung der Robotergeometrie und dessen Wirkungsbereiches. Durch Echtzeitberechnungen sollen dem Anwender Möglichkeiten geboten werden, diese Veränderungen direkt sichtbar zu machen.
Lange Entwicklungszeiten für die Konzeption von teils miteinander arbeitenden Robotersystemen in einer industriellen Umgebung könnten damit stark reduziert und somit die entstehenden Kosten gesenkt werden. Gleichzeitig fördert diese Funktion das Verständnis für die Einflüsse verschiedener Kinematiken auf das Verhalten des Roboters. Dies ist ein Aspekt, welcher in der Lehre und für Aus- sowie Weiterbildungszwecke von hohem Nutzen ist.
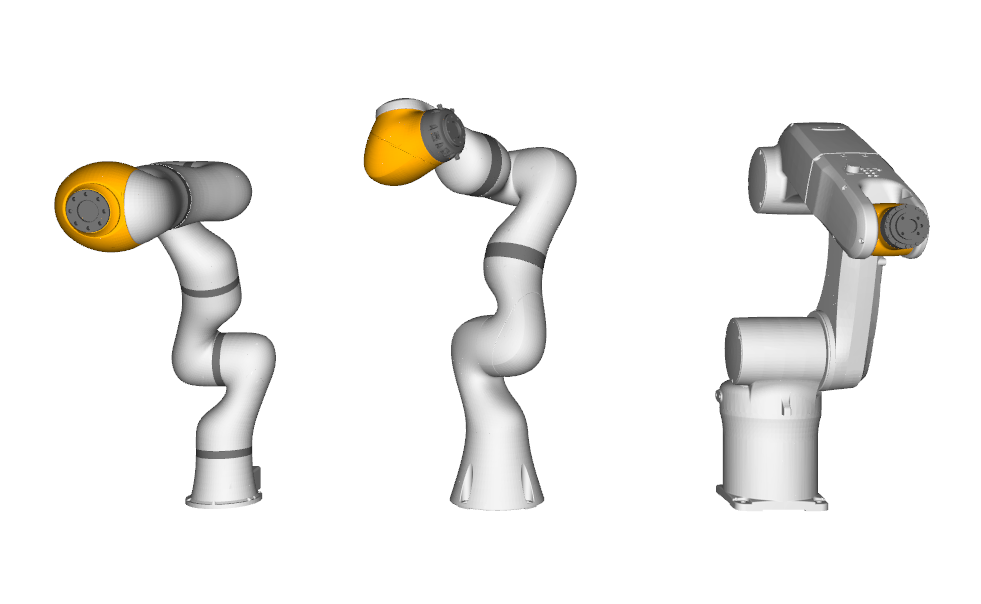
Dexteritätsanalyse eines LBR5 iiwa
")