Bewegungskompensation in der Strahlentherapie
Projektbeschreibung

Seit einigen Jahren ist es möglich, Tumore im gesamten Körper zielsicher zu bestrahlen. Die klinischen Anwendungen auf dem aktuellsten Stand der Technik ermöglichen es, eine letale Strahlungsdosis mit einer Genauigkeit von etwa 2-3 mm in der karzinomatösen Region zu platzieren. Um jedoch eine präzise Bestrahlung durchzuführen, müssen Tumorbewegungen (z.B. durch Atmung, Herzschlag oder Bewegungen des Patienten) kompensiert werden. Konventionelle Techniken basieren auf Gating Verfahren, Bestrahlung des Tumors zu bestimmten Atemphasen oder der Vergrößerung des Zielvolumens, bis sichergestellt ist, dass sich der Tumor nur innerhalb des Zielvolumens bewegt.
Ein von Prof. Schweikard, in Zusammenarbeit mit Accuray Inc., Sunnyvale, CA, entwickeltes Verfahren, behebt dieses Problem durch den Einsatz eines stereoskopischen Infrarot(IR)-Kamerasystems, um die Brust- bzw. Bauchbewegung des Patienten zu erfassen. Basierend auf den äußeren Surrogaten können über ein mathematisches Modell, dem sogenannten Korrelationsmodel, Rückschlüsse auf die eigentliche Tumorbewegung geschlossen werden. Ein roboterisiertes Bestrahlungssystem, z.B. das CyberKnife System, kann mit diesen Informationen Patienten- und Atmungsbewegungen in Echtzeit detektieren und korrigieren.
Forschungsgebiete:
Vorhersage von Atmungsbewegungen:
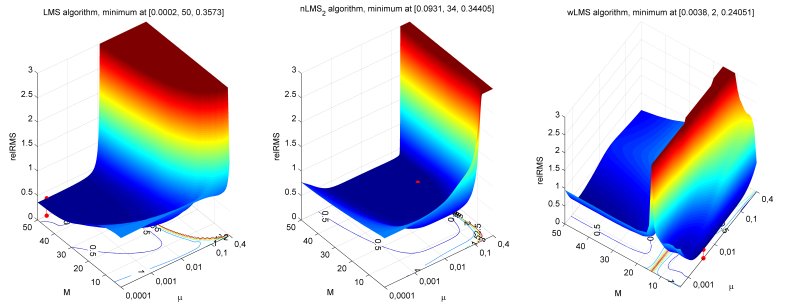
Ein in diesem Ansatz neu auftretendes Problem ist die Tatsache, dass weder die Aufnahme der Patientenposition noch die Repositionierung des Robotersystems tatsächlich in Echtzeit erfolgen kann. Die momentan im klinischen Einsatz befindlichen Systeme haben Latenzen zwischen 50 und 300 ms. Die dadurch entstehenden Fehler in der Zielfindung können durchaus mehrere Millimeter betragen. Dieser systematische Fehler kann durch die Zeitreihenprädiktion der äußeren Surrogate minimiert werden. Neben klassischen Prädiktionsverfahren, wie dem least mean square (LMS) Verfahren, lag der Forschungsschwerpunkt in jüngster Zeit besonders auf Verfahren aus dem Bereich des maschinellen Lernens (Kernel Methoden, stochastische Lernansätze). Die Weiterentwicklung dieser Algorithmen ist ein Kernthema in diesem Forschungsprojekt.

In Laborumgebung wurde beispielhaft die menschliche Atmung untersucht. Dazu wurden auf der Brust eines Probanden 20 Infrarot-LEDs befestigt, die mit Hilfe eines Trackingsystems (atracsys accuTrack compact) aufgezeichnet wurden. Die Kamera wurde durch einen Roboterarm getragen, um genaue und stabile Positionierung zu Gewähr leisten. Ein Ausschnitt der aufgezeichneten Atmung wird im folgenden Video dargestellt.
Detektierung der Tumorbewegung (Korrelationsmodelle):
Sobald die Bewegung der Brustkorboberfläche bekannt ist, können daraus Schlüsse über die Tumorposition gezogen werden. Dies geschieht mit Hilfe eines Korrelationsmodells, das die Beziehung zwischen Oberflächen- und Tiefenbewegung simuliert. Wie dieses Modell aufgestellt und validiert werden kann, wird momentan untersucht.
Multimodale Bewegungskompensation:
Derzeitiger klinischer Standard in der bewegungskompensierten Strahlentherapie sind drei IR Marker, die beliebig auf Brust und Bauch des Patienten platziert werden können. Zahlreiche Studien haben belegt, dass die Korrelationsgenauigkeit maßgeblich von der Positionierung der Marker und dem Atmungsverhalten des Patient abhängen. Wir untersuchen, wie diese Abhängigkeiten durch Einsatz von multimodalen Messsystemen, z.B. Beschleunigung, Dehnung, Luftstrom und oberflächlicher Elektromyografie (EMG), reduziert werden können. Ziel dieses Forschungszweiges ist die Entwicklung multimodaler Prädiktions- und Korrelationsmodelle. Ein besonderer Fokus liegt dabei auf Feature Detektionsalgorithmen zur Echtzeitbestimmung der am meisten relevanten und am wenigsten redundanten Sensoren. Durch eine optimale Wahl der Features kann die Robustheit des Gesamtsystems erhöht werden.
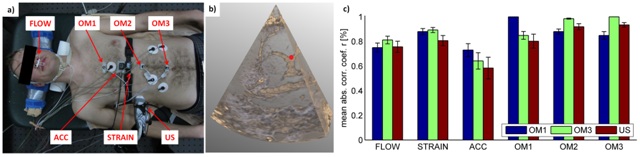
a) Messaufbau für eine multimodale Messung mit Luftstromsensor (FLOW), optischen Marken 1-3 (OM 1-3), Beschleunigungssensor (ACC), Dehnungsgurt (STRAIN) und Ultraschalltransducer (US),
b) Beispiel von einem US Bild mit einer exemplarisch gewählten Zielregion (roter Punkt) in der Leber,
c) mittlere absolute Korrelationkoeffizient und Standardabweichung von allen externen Sensoren bezogen auf OM1, OM3 und US.
Wahrscheinlichkeitsbasierte Modelle:
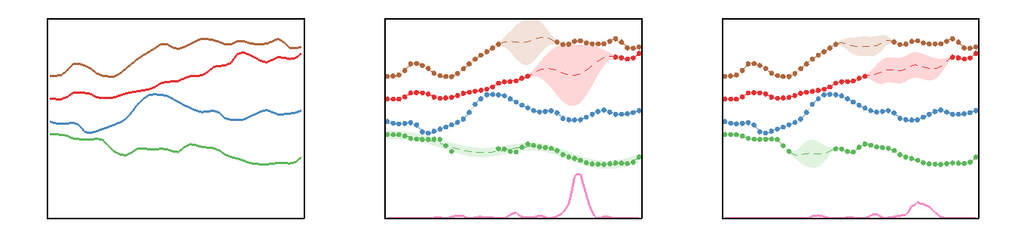
Surrogat gestützte Bewegungskompensation besteht aus einem Prädiktions- und einem Korrelationsalgorithmus, die sequentiell miteinander verbunden sind. Das bedeutet, der Eingang des zweiten Modells (z.B. Korrelation) ist das Ergebnis des ersten Modells (z.B. Prädiktion). Dadurch können sich Fehler des ersten Modells im zweiten Modell verstärken. In diesem Kontext wurden Multi-task Gaussian Process (MTGP) Modelle untersucht. Sie ermöglichen es erstmalig beide Problemstellungen innerhalb eines Modells zu lösen und somit den Gesamtfehler von Korrelation und Prädiktion zu minimieren. MTGP Modelle stellen eine Erweiterung von Gaussian Processes (GP) Modellen dar, welche häufig im Bereich des maschinellen Lernens für Regressionsaufgaben benutzt werden. MTGPs ermöglichen es mehrere, unterschiedlich abgetastete Signale gleichzeitig zu modellieren und deren Korrelation untereinander zu lernen.
MTGP Toolbox
Der MTGP Ansatz ist sehr flexibel und kann für verschiedenste biomedizinische Probleme verwendet werden, wie z.B. der multimodalen Analyse vitaler Parameter von Krankenhauspatienten. In Kooperation mit dem Computational Health Informatics Lab (University of Oxford) wurde eine Matlab Toolbox entwickelt. Zum besseren Verständnis beinhaltet die Toolbox zahlreiche Beispiele. [Link Toolbox]
Veröffentlichungen
2009
Motion Compensation in Radiosurgery, Lübeck, Germany: Institute for Robotics, University of Lübeck, 2009.
Prädiktion von Herzbewegungen, 2009.
Predicting Respiratory Motion Signals using Accurate Online Support Vector Regression (SVRpred), Berlin, Germany , 2009. pp. 255-256.
| DOI: | 10.1007/s11548-009-0340-z |
| Datei: | s11548-009-0340-z |
TH-C-304A-07: Real-Time Tracking of the Pulmonary Veins in 3D Ultrasound of the Beating Heart, Anaheim, CA, USA , 2009. pp. 2804.
| DOI: | 10.1118/1.3182643 |
| Datei: | 1.3182643 |
2008
A family of linear algorithms for the prediction of respiratory motion in image-guided radiotherapy, Barcelona, Spain , 2008. pp. 31-32.
| DOI: | 10.1007/s11548-008-0169-x |
| Datei: | s11548-008-0169-x |
A Fast Lane Approach to LMS Prediction of Respiratory Motion Signals, Biomedical Signal Processing and Control , vol. 3, no. 4, pp. 291-299, 2008.
| DOI: | 10.1016/j.bspc.2008.06.001 |
| Datei: | j.bspc.2008.06.001 |
Faster respiratory motion prediction aids radiotherapy, 2008.
| Datei: | redirect.asp |
Fiducial migration following small peripheral lung tumor image-guided CyberKnife stereotactic radiosurgery: Visualization, Image-guided Procedures, and Modeling. Proceedings of SPIE, San Diego, CA , 2008. pp. 69181A-69181A-9.
| DOI: | 10.1117/12.769042 |
| Datei: | 12.769042 |
Flexible Markergeometrien zur Erfassung von Atmungs- und Herzbewegungen an der Körperoberfläche, Bartz, Dirk and Bohn, S. and Hoffmann, J., Eds. Leipzig, Germany , 2008. pp. 15-16.
Graphical Tool for the Prediction of Respiratory Motion Signals, Bartz, Dirk and Bohn, S. and Hoffmann, J., Eds. Leipzig, Germany , 2008. pp. 179-180.
Predicting Respiratory Motion Signals for Image-Guided Radiotherapy using Multi-step Linear Methods (MULIN), International Journal of Computer Assisted Radiology and Surgery , vol. 3, no. 1--2, pp. 85-90, 2008.
| DOI: | 10.1007/s11548-008-0211-z |
| Datei: | s11548-008-0211-z |
Prediction of respiratory motion using a modified Recursive Least Squares algorithm, Bartz, Dirk and Bohn, S. and Hoffmann, J., Eds. Leipzig, Germany , 2008. pp. 157-160.
2007
Prediction of respiratory motion with a multi-frequency based Extended Kalman Filter, Berlin, Germany , 2007. pp. 56-58.
| DOI: | 10.1007/s11548-007-0083-7 |
| Datei: | s11548-007-0083-7 |
Prediction of Respiratory Motion with Wavelet-based Multiscale Autoregression, Ayache, Nicholas and Ourselin, S. and Maeder, A., Eds. Brisbane, Australia: Springer, 2007. pp. 668-675.
| DOI: | 10.1007/978-3-540-75759-7\_81 |
| Datei: | 978-3-540-75759-7\_81 |
Processing of Respiratory Signals from Tracking Systems for Motion Compensated IGRT, Minneapolis-St. Paul, MN, USA , 2007. pp. 2565.
| DOI: | 10.1118/1.2761413 |
| Datei: | 1.2761413 |
Technical Description, Phantom Accuracy, and Clinical Feasibility for Single-session Lung Radiosurgery Using Robotic Image-guided Real-time Respiratory Tumor Tracking, Technology in Cancer Research and Treatment , vol. 6, no. 4, pp. 321-328, 2007.
2006
Computer aided robotic radiosurgery, Computer Aided Surgery , vol. 11, no. 4, pp. 161-174, 2006.
| DOI: | 10.1080/10929080600886393 |
| Datei: | 10929080600886393 |
New Technologies in Radiation Oncology, Schlegel, Wolfgang C. and Bortfeld, Thomas and Grosu, A.-L., Eds. Springer, 2006, pp. 337-343.
| DOI: | 10.1007/3-540-29999-8_26 |
| Datei: | 3-540-29999-8_26 |
Robotic Radiosurgery: The Kindest Cut of All, 2006. The Institution of Engineering and Technology Seminar on (Ref. No. 2006/11372), 2006. pp. 73-92.
2005
Cyberknife Radiochirurgie, Medizintechnik in Bayern , pp. 32-36, 2005.
Extracranial Stereotactic Radiotherapy and Radiosurgery, Slotman, Solberg, Wurm, Eds. New York: Taylor and Francis, 2005, pp. 71-87.
| ISBN: | 0824726979 |
Predictive Compensation of Breathing Motion in Lung Cancer Radiosurgery, Heidelberg: Springer Verlag, 2005.
| ISBN: | 3-540-00321-5 |
Respiration tracking in radiosurgery without fiducials, International Journal of Medical Robotics and Computer Assisted Surgery , vol. 1, no. 2, pp. 19-27, 2005.
| DOI: | 10.1002/rcs.38 |
| Datei: | rcs.38 |
2004
Fiducial-Less Respiration Tracking in Radiosurgery, Springer, 2004. pp. 992-9.
Respiration Tracking in Radiosurgery, Medical Physics , vol. 31, no. 10, pp. 2738-2741, 2004. American Association of Physicists in Medicine.
| DOI: | 10.1118/1.1774132 |
| Datei: | 1.1774132 |

- Forschung
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultraschallgeführte Strahlenchirurgie
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Abgeschlossene Projekte -
- Hochpräzise Bewegungsverfolgung am Kopf in der Strahlentherapie
- Neurologische Modellierungen
- Modellierung von Herzbewegungen
- Bewegungskompensation in der Strahlentherapie
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Ziel-basierendes lebenslanges autonomes Lernen
- Transkranielle Elektrostimulation
- Bestrahlungsplanung
- Transkranielle Magnetstimulation
- Navigation in der Leberchirurgie
- Stereotaktische Mikronavigation
- OP - Mikroskop
- Interaktiver C-Arm
- OCT-basierte Neurobildgebung
Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ralf Bruder

Gebäude 64
,
Raum 92
ralf.bruder(at)uni-luebeck.de
+49 451 31015205